Okay
Dit snap ik niet:
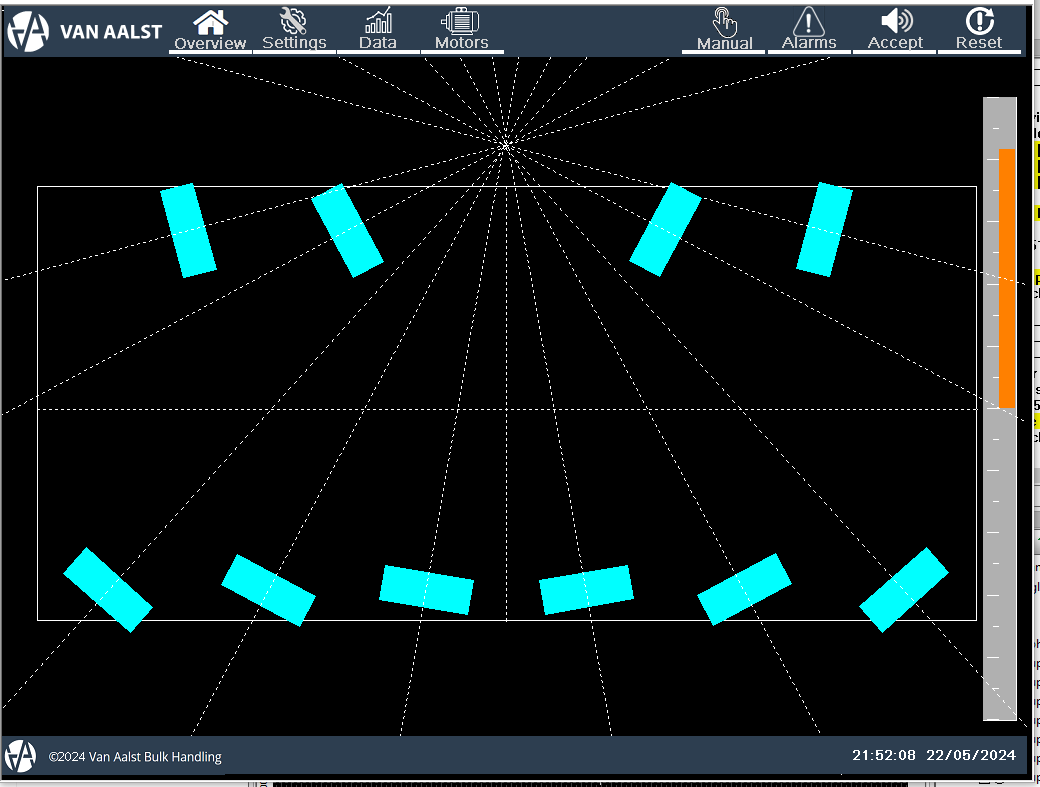
ik heb dus 12 analoge uitgangen, waarmee naar een bepaalde positie kan sturen, en elk wielstel krijg ik een analoge ingang als feedback of het wiel in de goede hoek staat.
Bedoel je dat je er een analoge uitgangswaarde van de PLC de stand van het wiel bepaald (dus bijvoorbeeld zoveel volt per graad, max 360 graad) en dat en dan een aan/uit signaal terugkomt als die stand is bereikt ??
Dat zou betekenen dat je geen controle hebt over de rotatiesnelheid van een wiel (de stuursnelheid, hoe snel het wiel naar een nieuwe stand draait) , en dat is een probleem als het voertuig beweegt.
Als die snelheid niet verschillend kan zijn dan ga je enorm veel weerstand krijgen en flink wat rubber verlies.
Om de wielen allemaal continue te laten wijzen naar een rotatiepunt op een denkbeeldige lijn door het midden van het voertuig zal de snelheid waarmee de wielen naar een nieuwe stand bewegen verschillend moeten zijn. Natuurlijk niet voor de wielen die op gespiegelde posities zitten ten opzichte van die denkbeeldige lijn. Links en rechts tegenover elkaar hebben dezelfde stuur draaisnelheid bij de rotatiepunt methode.
Een bijkomend probleem is dan besturen met een knuppel, wat nou als de bestuurder de knuppel half naar rechts doet en nog voordat de wielen die nieuwe stand hebben bereikt de knuppel in een andere stand zet? Dan moet opnieuw een de nieuwe gewenste stand per wiel worden doorgegeven en de stuurrotatiesnelheid per wiel opnieuw berekend worden per wiel.
Dus besturen met een draaiknop ipv knuppel lijkt meer voor de hand te liggen met daarbij een knop "ga naar deze nieuwe stand" en een display die aangeeft dat die nieuwe stand bereikt is
Maar goed als de stuurrotatiesnelheid per wiel niet in te stellen is , dan lijkt me dat je alleen de wielen in een nieuwe stand kan zetten als het voertuig stilstaat.
De rest van het probleem lijkt niet zo moeilijk, arctan, sinus zoiets. Wat ik me wel afvraag is of de gebruikte PLC en zijn programmeertaal in staat is om multi threaded te werken. Want je wilt natuurlijk dat alle wielen tegelijkertijd naar een nieuwe stuurpositie draaien. Ik weet weinig van PLC's behalve dat old school kunnen zijn en niet altijd een Multi-Tasking Operating System hebben waar door je moet wachten op processen die fysiek een poosje duren. Dat betekend dat je een grote loop moet hebben die alle wielen in een keer in een nieuwe stand zet terwijl je voor elk wiel afzonderlijk het signaal "stand bereikt" pollt, of je doet elk wiel afzonderlijk en wacht tot die in de nieuwe stand staat. Bij dat laatste is alweer stilstand van het voertuig nodig.
Maar goed, bovenstaande is gebaseerd op te weinig kennis van de machine en zijn besturing, ik kan het volledig mis hebben.
Greezt,
Markus